
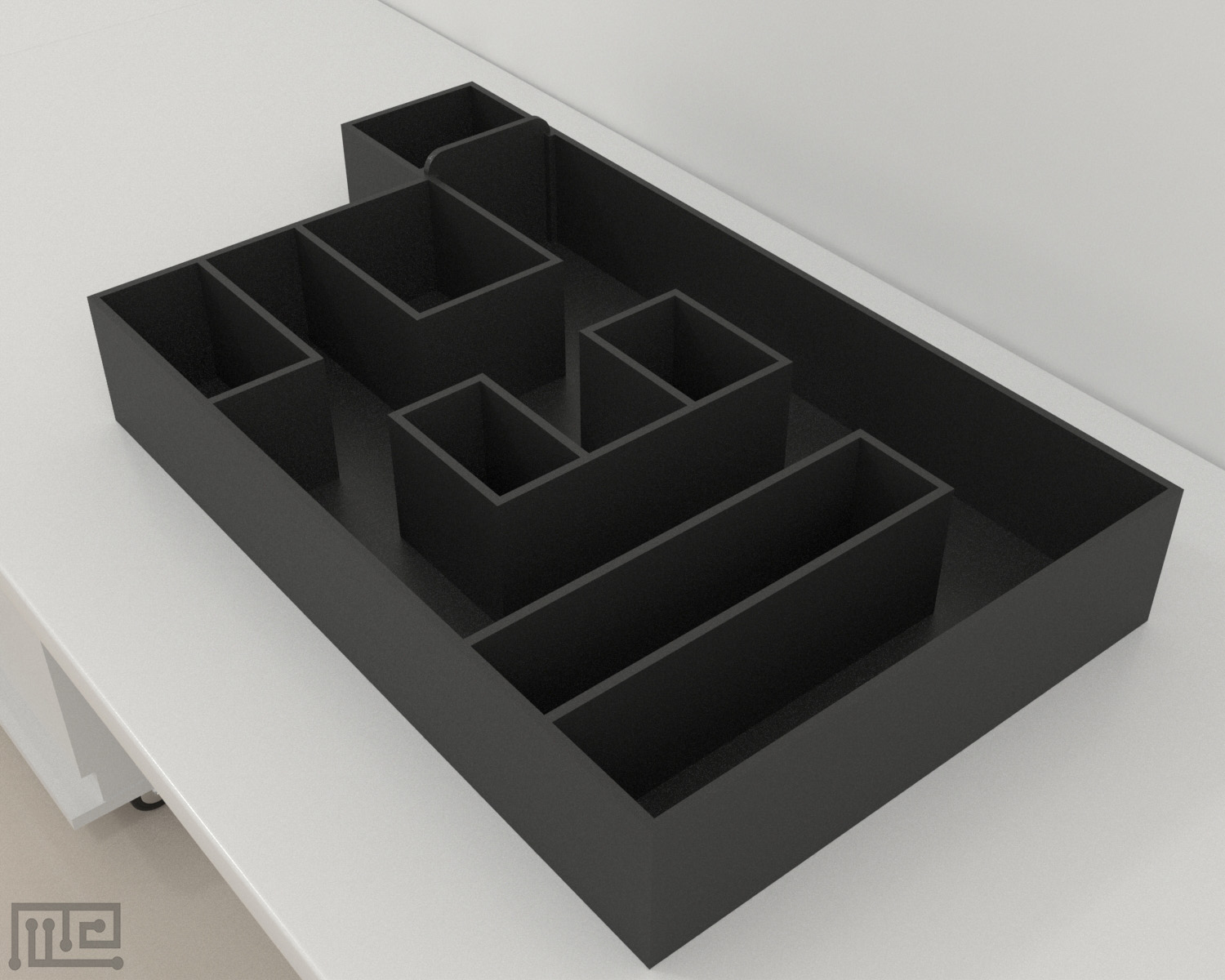
The Crab Complex Maze was used by Ross Davies et al. (2019), to investigate the ability of European shore crabs, Carcinus maenas, to learn a complex maze over four consecutive weeks using food as a motivator.
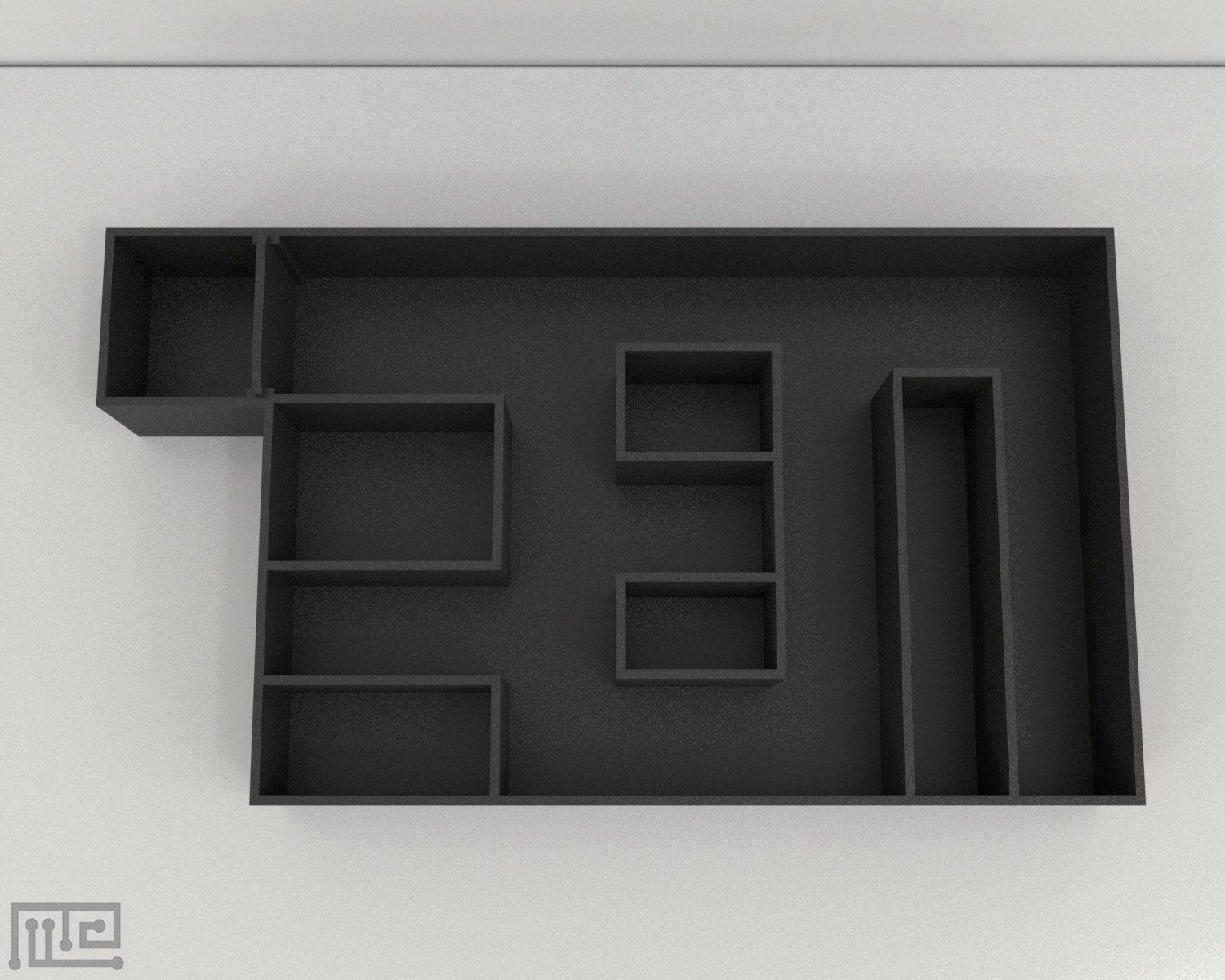
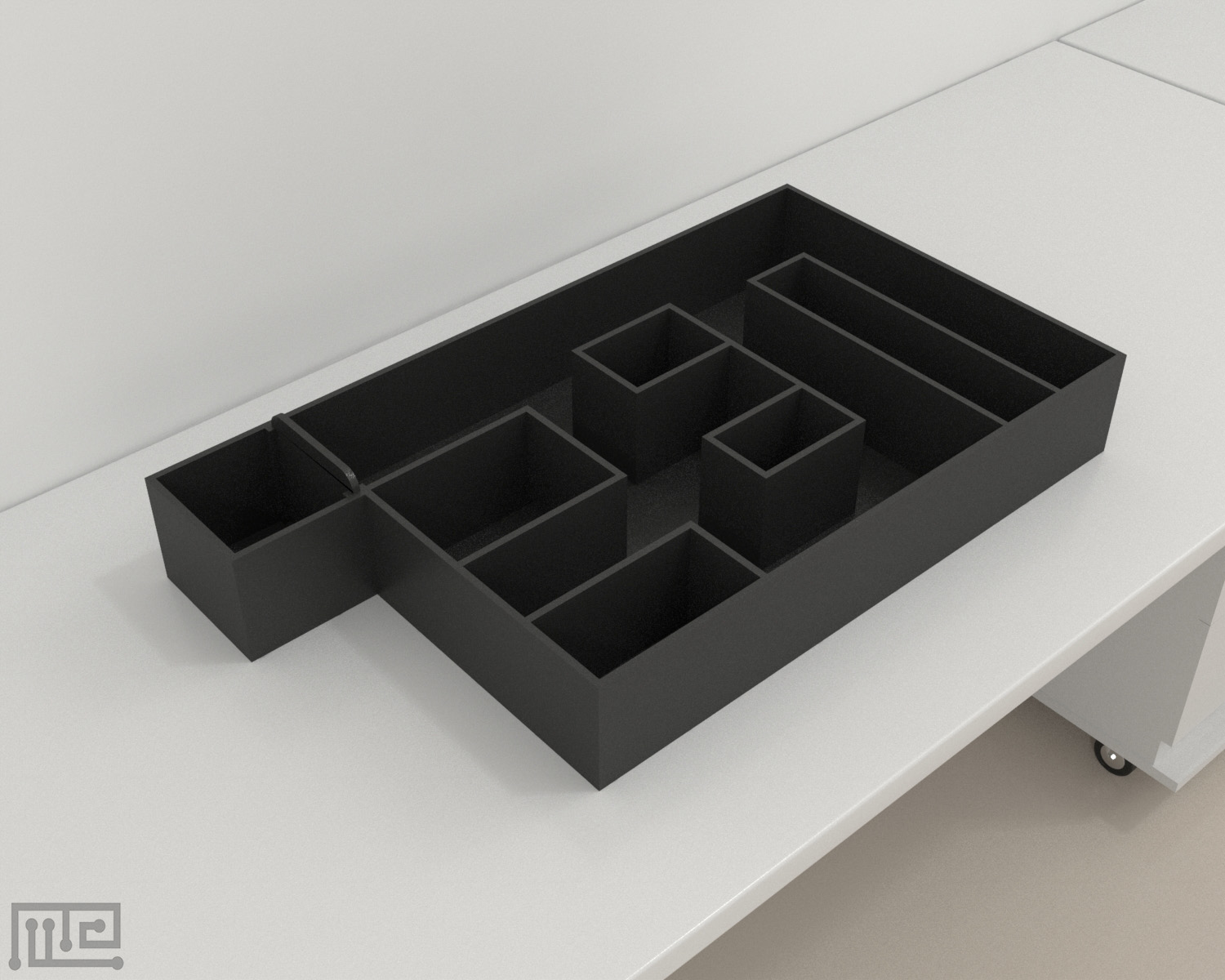
The maze was constructed from opaque black Perspex. A starting chamber was positioned adjacent to the entrance and separated from the main maze with a removable piece of black Perspex. The maze had a single correct path to the endpoint, requiring five changes of direction and included three dead ends. All passages were a direct route from the starting box to the endpoint.
At the end of the experiment, crabs showed steady improvement during this conditioning period in both the time taken to find the food and in the number of wrong turns taken. They also clearly remembered the maze as when returned two weeks later but without any food, they all returned to the end of the maze in under 8 mins.
Mazeengineers offers the Crab Complex Maze.
Price & Dimensions
Crab Complex Maze
$ 1790
+S&H- Width of maze: 75cm
- Length of maze: 50cm
- Height of maze: 12.5cm
- Width of starting chamber: 15cm
- Length of starting chamber: 15cm
- Height of starting chamber: 12.5cm
- Width of passages: 10cm
Documentation
Introduction
The Complex maze is used to study spatial learning, memory, and decision-making behaviors in rodents. It consists of 10 x 10 units and has six decision-making points. The multiple decision-making points greatly challenge the decision-making abilities of the subjects, unlike other mazes such as the T-Maze or Y-maze that contain only a single decision-making point. Furthermore, each unit of the Complex maze has four removable surrounding walls. Since the surrounding walls can easily be inserted or removed, different maze configurations can be applied, which can further challenge the subjects’ cognitive abilities. Different internal cues, such as landmarks, can also be inserted into the maze to indicate the correct direction to navigate.
Spatial navigation is a popular behavioral model used to examine cognitive and perceptual processes underlying learning, memory, and decision-making behaviors in rodents (Lithfous, Dufour, & Després, 2013). The Complex maze is a spatial navigation maze that requires the subject to correctly navigate through the maze to reach the endpoint or reward. As the subject navigates the maze, it either reaches a dead-end if it makes a wrong turn or the next decision-making point or reward if it chooses the correct direction. The Complex maze can easily be used for the application of different experimental protocols. Wu et al. (2016) constructed the maze to investigate if a hybrid-brain computer system could demonstrate maze learning behaviors. Since spatial navigation mazes such as the Morris Water Maze are continuously being used to study age-related cognition (Rodgers, Sindone, & Moffat, 2012), the Complex maze can also be used as a translational tool to investigate the effects of age-related changes on spatial navigation behaviors. Moreover, it can also be used to evaluate the effects of brain lesions, pharmacological manipulations, and diseases and disorders on learning and memory.
Other apparatuses used in the evaluation of learning and memory include the Radial Arm Maze and the Hebb-Williams Maze.
Apparatus and Equipment
The Complex Maze consists of 10 x 10 units, with each unit being 15 cm x 15 cm x 15 cm. Each unit has four removable surrounding walls that allow the maze to consist of different configurations. The surrounding walls can either be inserted or removed, which causes the corresponding adjacent units to become connected or blocked. The landmark measures 6 cm x 6 cm x 1 cm and is made of transparent glass that is diamond-shaped. On the inner sides of the landmark, papers printed with patterned colors of red or blue are stuck. The maze contains a transparent glass plate cover to prevent the subjects from escaping during trials.
Training Protocol
Clean the maze before and after every trial to prevent the influence of any odor cues from previous trials. Appropriately light the apparatus. A tracking and recording system such as the Noldus Ethovision XT can be used to assist with observations.
Habituation and Pre-training
Deprive the subjects of water for two days before the training. Place the subject in the starting unit. Allow the subjects to explore the maze freely. Reward the subject with a small amount of water when it reaches the end of the maze. Remove the subjects from the maze and conduct another trial. After the subject correctly navigates the maze for at least three consecutive trials, change the maze configuration. Conduct training 20 times per day over five days.
Complex Maze task
Place the subject in the starting unit. Allow the subject to explore the maze and claim the reward. Remove the subject from the maze and conduct another trial. Change the configuration of the maze. Conduct trials until the subject meets the required learning criteria.
Complex Maze landmark following task
Place landmarks in the correct direction of the six decision-making points of the maze. Place the subject in the starting unit. Allow the subject to explore the maze and claim the reward. Remove the subject from the maze and conduct another trial. Change the configuration of the maze. Conduct trials until the subject meets the required learning criteria.
Literature Review
Investigation of the ability of a hybrid brain-computer system to learn a maze navigation task
Wu et al. (2016) investigated whether a hybrid brain-computer system could outperform unenhanced rats in navigating the complex maze. Adult male Sprague-Dawley rats were implanted with electrodes at their bilateral medial forebrain bundles (MFB). The rats were provided with electric stimuli generated by a computer that was wirelessly delivered to a backpack stimulator, which provided electric stimuli to their brains that turned them into ratbots. A video camera was used to capture the subjects’ movements in the maze, which was connected to the computer system to guide the subjects. The computer was used to conduct three rule learning operations, which consisted of rule learning, rule application, and rule combination, and transfer. The configurations of the maze were changed after the subject navigated the maze correctly so that there was no prior spatial knowledge of the maze. In the rule learning phase, the ability of the ratbots to construct a digital spatial map was tested. The computer-generated a digital reward map and delivered MFB stimulation according to the ratbots position in the maze. The experiment was repeated using the same rats; however, the computer system did not help guide the subjects. The unenhanced subjects were thus required to navigate the maze using their biological spatial skills and were used as the control group. The results indicated that the control subjects took more trials to learn the correct path of the maze as compared to the ratbots. In the rule application phase, six landmarks were placed in the maze at the correct direction of the corresponding decision point. The ratbots ability to apply the rule of following the set of landmarks was tested against the control group. The results indicated that the ratbots significantly outperformed the control group in the navigation task. Similar results were observed even when the ratbots were required to perform the task wearing a face mask that blocked their biological vision and tactile sensation from their whiskers. In the rule combination and transfer phase, the two rule operations from the previous two experiments were combined. The results indicated that the ratbots were able to learn the correct path of the maze in just two trials and demonstrated faster learning as compared to the control group.
Data Analysis
The following can be observed using the complex maze:
- The number of times the subject chose the correct path at the decision point.
- The number of times the subject chose the incorrect path at the decision point.
- The number of trials performed until the subject navigated the maze correctly.
- The number of trials taken to complete the task
- Time taken to complete a trial.
Strengths and Limitations
Strengths
The Complex maze can be used to study spatial learning, memory, and decision-making behaviors in rodents. It contains six decision-making points in contrast to other mazes, such as the T-Maze and Y-maze, that only contain a single decision-making point. The maze has removable walls that allow different maze configurations to be applied. The complex maze can easily be modified according to different experimental needs. Internal cues, such as landmarks, can be inserted to help make the navigation task easier.
Limitations
Unintentional stimuli may affect the way the subject performs the tasks. The subject’s explorative drive is also an important factor in obtaining reliable results. The tasks may also be influenced by age, gender, and strain of the subjects.
Summary
- The Complex maze is used to study spatial learning and memory behaviors in rodents.
- It is a navigation maze that has many decision-making points and dead ends.
- The inner walls of the maze are removable, which allows different maze configurations to be applied.
- Internal cues such as landmarks can also easily be placed within the maze.
References
- Davies, R., Gagen, M .H., C. Bull, J. C., Pope, E. C. (2019). Maze learning and memory in a decapod crustaceanBiol. Lett.152019040720190407
http://doi.org/10.1098/rsbl.2019.0407 - Lithfous, S., Dufour, A., & Després, O. (2013). Spatial navigation in normal aging and the prodromal stage of Alzheimer’s disease: insights from imaging and behavioral studies. Ageing research reviews, 12(1), 201–213. https://doi.org/10.1016/j.arr.2012.04.007
- Rodgers, M. K., Sindone, J. A., 3rd, & Moffat, S. D. (2012). Effects of age on navigation strategy. Neurobiology of aging, 33(1), 202.e15–202.e2.02E22. https://doi.org/10.1016/j.neurobiolaging.2010.07.021
- Wu, Z., Zheng, N., Zhang, S., Zheng, X., Gao, L., & Su, L. (2016). Maze learning by a hybrid brain-computer system. Scientific reports, 6, 31746. https://doi.org/10.1038/srep31746